Hello Guys,
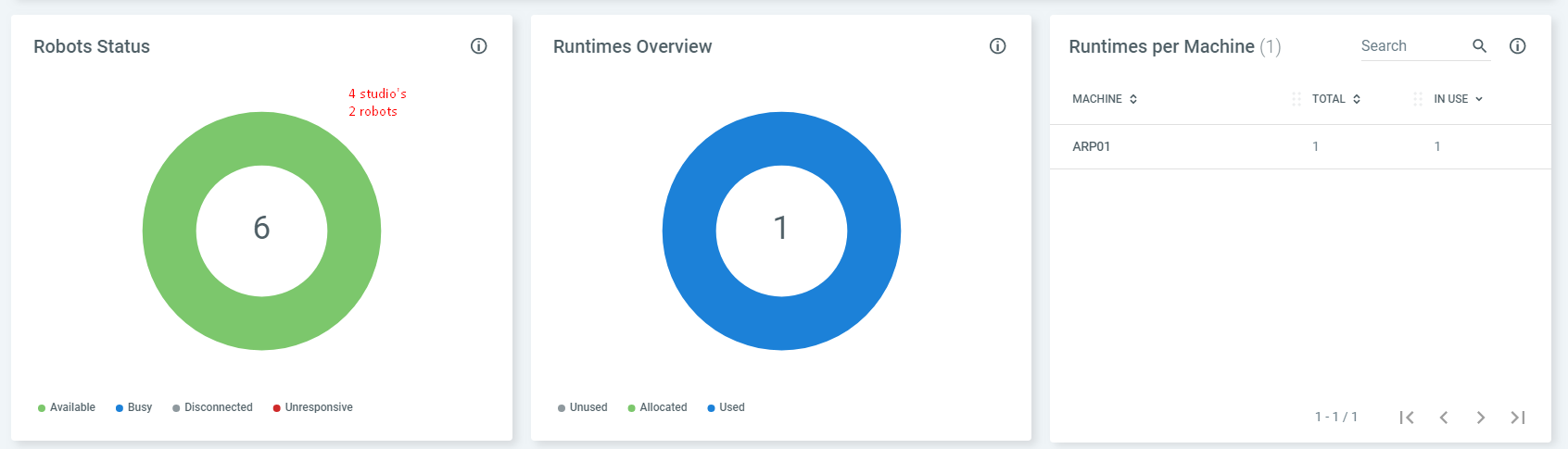
Im currently facing a small problem within the orcehstrator. I want to use a second unnattended robot while I have one unnattended license (one runtime that will be executing back office processes simultaneously). I can connect this second robot no problem but when I want to excecute a process with Robot 2 I get an error: “Robot Licensing Failed. There are no available runtime licenses. (#1915).”
What seems to be the problem is, is that Robot 1 never releases the runtime license (Even though it is not processing any processes at the moment).

Do you have any idea to resolve this problem?
Kind regards,