Hi Guys,
I’ve seen the python invoke method demo and it works fine.
I’m now trying to replicate this with my script.
Code is here:
# load yolov3 model and perform object detection
# based on https://github.com/experiencor/keras-yolo3
import numpy as np
from numpy import expand_dims
from keras.models import load_model
from tensorflow.keras.utils import load_img
from tensorflow.keras.utils import img_to_array
from matplotlib import pyplot
from matplotlib.patches import Rectangle
import sys
class BoundBox:
def __init__(self, xmin, ymin, xmax, ymax, objness = None, classes = None):
self.xmin = xmin
self.ymin = ymin
self.xmax = xmax
self.ymax = ymax
self.objness = objness
self.classes = classes
self.label = -1
self.score = -1
def get_label(self):
if self.label == -1:
self.label = np.argmax(self.classes)
return self.label
def get_score(self):
if self.score == -1:
self.score = self.classes[self.get_label()]
return self.score
def _sigmoid(x):
return 1. / (1. + np.exp(-x))
def decode_netout(netout, anchors, obj_thresh, net_h, net_w):
grid_h, grid_w = netout.shape[:2]
nb_box = 3
netout = netout.reshape((grid_h, grid_w, nb_box, -1))
nb_class = netout.shape[-1] - 5
boxes = []
netout[..., :2] = _sigmoid(netout[..., :2])
netout[..., 4:] = _sigmoid(netout[..., 4:])
netout[..., 5:] = netout[..., 4][..., np.newaxis] * netout[..., 5:]
netout[..., 5:] *= netout[..., 5:] > obj_thresh
for i in range(grid_h*grid_w):
row = i / grid_w
col = i % grid_w
for b in range(nb_box):
# 4th element is objectness score
objectness = netout[int(row)][int(col)][b][4]
if(objectness.all() <= obj_thresh): continue
# first 4 elements are x, y, w, and h
x, y, w, h = netout[int(row)][int(col)][b][:4]
x = (col + x) / grid_w # center position, unit: image width
y = (row + y) / grid_h # center position, unit: image height
w = anchors[2 * b + 0] * np.exp(w) / net_w # unit: image width
h = anchors[2 * b + 1] * np.exp(h) / net_h # unit: image height
# last elements are class probabilities
classes = netout[int(row)][col][b][5:]
box = BoundBox(x-w/2, y-h/2, x+w/2, y+h/2, objectness, classes)
boxes.append(box)
return boxes
def correct_yolo_boxes(boxes, image_h, image_w, net_h, net_w):
new_w, new_h = net_w, net_h
for i in range(len(boxes)):
x_offset, x_scale = (net_w - new_w)/2./net_w, float(new_w)/net_w
y_offset, y_scale = (net_h - new_h)/2./net_h, float(new_h)/net_h
boxes[i].xmin = int((boxes[i].xmin - x_offset) / x_scale * image_w)
boxes[i].xmax = int((boxes[i].xmax - x_offset) / x_scale * image_w)
boxes[i].ymin = int((boxes[i].ymin - y_offset) / y_scale * image_h)
boxes[i].ymax = int((boxes[i].ymax - y_offset) / y_scale * image_h)
def _interval_overlap(interval_a, interval_b):
x1, x2 = interval_a
x3, x4 = interval_b
if x3 < x1:
if x4 < x1:
return 0
else:
return min(x2,x4) - x1
else:
if x2 < x3:
return 0
else:
return min(x2,x4) - x3
def bbox_iou(box1, box2):
intersect_w = _interval_overlap([box1.xmin, box1.xmax], [box2.xmin, box2.xmax])
intersect_h = _interval_overlap([box1.ymin, box1.ymax], [box2.ymin, box2.ymax])
intersect = intersect_w * intersect_h
w1, h1 = box1.xmax-box1.xmin, box1.ymax-box1.ymin
w2, h2 = box2.xmax-box2.xmin, box2.ymax-box2.ymin
union = w1*h1 + w2*h2 - intersect
return float(intersect) / union
def do_nms(boxes, nms_thresh):
if len(boxes) > 0:
nb_class = len(boxes[0].classes)
else:
return
for c in range(nb_class):
sorted_indices = np.argsort([-box.classes[c] for box in boxes])
for i in range(len(sorted_indices)):
index_i = sorted_indices[i]
if boxes[index_i].classes[c] == 0: continue
for j in range(i+1, len(sorted_indices)):
index_j = sorted_indices[j]
if bbox_iou(boxes[index_i], boxes[index_j]) >= nms_thresh:
boxes[index_j].classes[c] = 0
# load and prepare an image
def load_image_pixels(filename, shape):
# load the image to get its shape
image = load_img(filename)
width, height = image.size
# load the image with the required size
image = load_img(filename, target_size=shape)
# convert to numpy array
image = img_to_array(image)
# scale pixel values to [0, 1]
image = image.astype('float32')
image /= 255.0
# add a dimension so that we have one sample
image = expand_dims(image, 0)
return image, width, height
# get all of the results above a threshold
def get_boxes(boxes, labels, thresh):
v_boxes, v_labels, v_scores = list(), list(), list()
# enumerate all boxes
for box in boxes:
# enumerate all possible labels
for i in range(len(labels)):
# check if the threshold for this label is high enough
if box.classes[i] > thresh:
v_boxes.append(box)
v_labels.append(labels[i])
v_scores.append(box.classes[i]*100)
# don't break, many labels may trigger for one box
return v_boxes, v_labels, v_scores
# draw all results
def draw_boxes(filename, v_boxes, v_labels, v_scores):
# load the image
data = pyplot.imread(filename)
# plot the image
pyplot.imshow(data)
# get the context for drawing boxes
ax = pyplot.gca()
# plot each box
for i in range(len(v_boxes)):
box = v_boxes[i]
# get coordinates
y1, x1, y2, x2 = box.ymin, box.xmin, box.ymax, box.xmax
# calculate width and height of the box
width, height = x2 - x1, y2 - y1
# create the shape
rect = Rectangle((x1, y1), width, height, fill=False, color='white')
# draw the box
ax.add_patch(rect)
# draw text and score in top left corner
label = "%s (%.3f)" % (v_labels[i], v_scores[i])
pyplot.text(x1, y1, label, color='white')
# show the plot
pyplot.show()
def init():
# load yolov3 model
model = load_model('./yolov3_model.h5', compile=False)
# define the expected input shape for the model
input_w, input_h = 416, 416
# define our new photo
photo_filename = './Hydrant.png'
# load and prepare image
image, image_w, image_h = load_image_pixels(photo_filename, (input_w, input_h))
# make prediction
yhat = model.predict(image)
# summarize the shape of the list of arrays
print([a.shape for a in yhat])
# define the anchors
anchors = [[116,90, 156,198, 373,326], [30,61, 62,45, 59,119], [10,13, 16,30, 33,23]]
# define the probability threshold for detected objects
class_threshold = 0.6
boxes = list()
for i in range(len(yhat)):
# decode the output of the network
boxes += decode_netout(yhat[i][0], anchors[i], class_threshold, input_h, input_w)
# correct the sizes of the bounding boxes for the shape of the image
correct_yolo_boxes(boxes, image_h, image_w, input_h, input_w)
# suppress non-maximal boxes
do_nms(boxes, 0.5)
# define the labels
labels = ["person", "bicycle", "car", "motorbike", "aeroplane", "bus", "train", "truck",
"boat", "traffic light", "fire hydrant", "stop sign", "parking meter", "bench",
"bird", "cat", "dog", "horse", "sheep", "cow", "elephant", "bear", "zebra", "giraffe",
"backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee", "skis", "snowboard",
"sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard",
"tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana",
"apple", "sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake",
"chair", "sofa", "pottedplant", "bed", "diningtable", "toilet", "tvmonitor", "laptop", "mouse",
"remote", "keyboard", "cell phone", "microwave", "oven", "toaster", "sink", "refrigerator",
"book", "clock", "vase", "scissors", "teddy bear", "hair drier", "toothbrush"]
# get the details of the detected objects
v_boxes, v_labels, v_scores = get_boxes(boxes, labels, class_threshold)
# summarize what we found
for i in range(len(v_boxes)):
print(v_labels[i], v_scores[i])
#draw what we found
draw_boxes(photo_filename, v_boxes, v_labels, v_scores)
if __name__ == '__main__':
init()
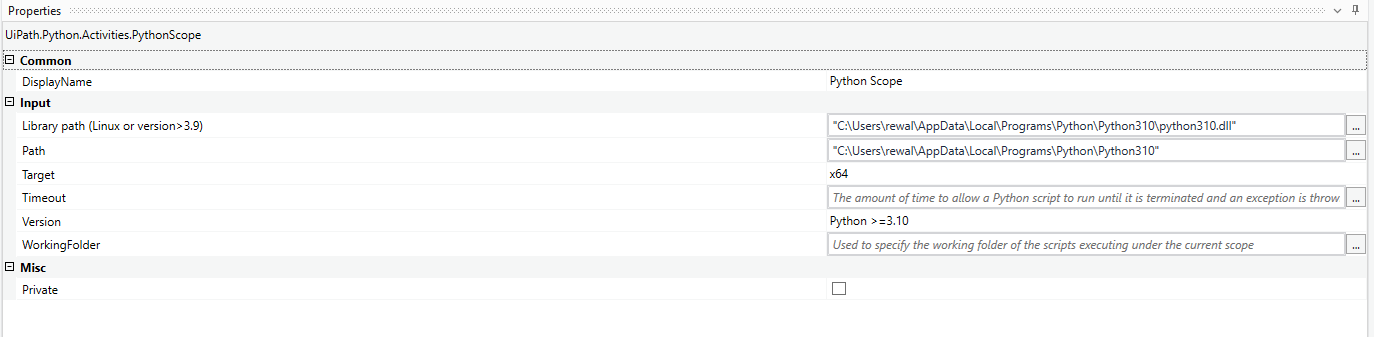
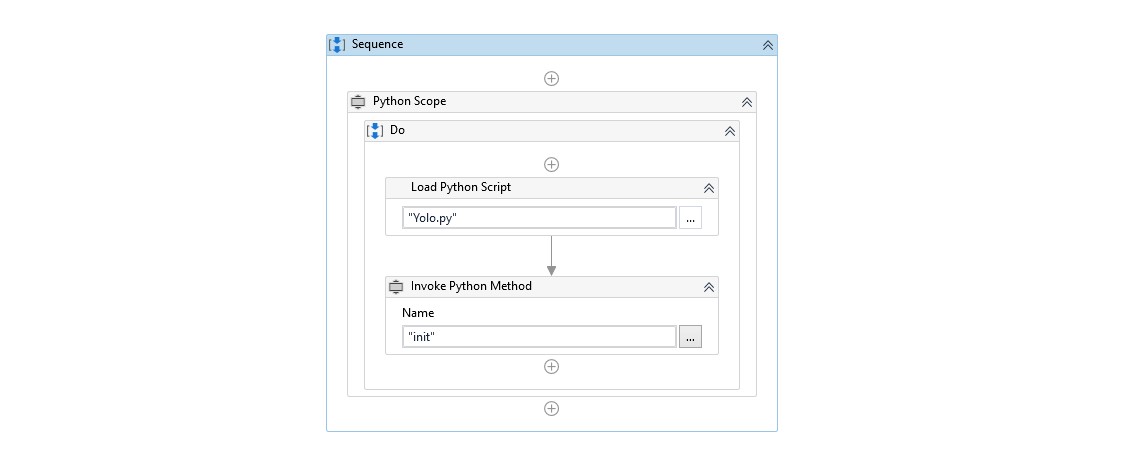
And this is my UiPath workflow:
The code works fine if I run the script in a windows shell, but it raises this error with UiPath:
22.4.1+Branch.master.Sha.ae3dd5d96272ef2a8c7136934fe08624b9ad1069
Source: Invoke Python Method
Message: One or more errors occurred.
Exception Type: System.AggregateException
RemoteException wrapping System.AggregateException: One or more errors occurred. ---> RemoteException wrapping System.InvalidOperationException: Error invoking Python method ---> RemoteException wrapping System.NullReferenceException: Object reference not set to an instance of an object.
at UiPath.Python.Impl.OutOfProcessEngine.<>c__DisplayClass15_0.<InvokeMethod>b__0()
at System.Threading.Tasks.Task`1.InnerInvoke()
at System.Threading.Tasks.Task.Execute()
--- End of stack trace from previous location where exception was thrown ---
at System.Runtime.CompilerServices.TaskAwaiter.ThrowForNonSuccess(Task task)
at System.Runtime.CompilerServices.TaskAwaiter.HandleNonSuccessAndDebuggerNotification(Task task)
at UiPath.Python.Activities.InvokeMethod.<ExecuteAsync>d__16.MoveNext()
--- End of inner exception stack trace ---
at UiPath.Python.Activities.InvokeMethod.<ExecuteAsync>d__16.MoveNext()
--- End of inner exception stack trace ---
at UiPath.Shared.Activities.AsyncTaskCodeActivity.EndExecute(AsyncCodeActivityContext context, IAsyncResult result)
at System.Activities.AsyncCodeActivity.System.Activities.IAsyncCodeActivity.FinishExecution(AsyncCodeActivityContext context, IAsyncResult result)
at System.Activities.AsyncCodeActivity.CompleteAsyncCodeActivityData.CompleteAsyncCodeActivityWorkItem.Execute(ActivityExecutor executor, BookmarkManager bookmarkManager)
Don’t know why, could it be because of the import at the beginning of my script?
Someone could help me fix this, please? Thanks a lot ![]()